2. Menjelaskan cara kerja rangkaian Kursi roda otomatis

2. Voltmeter
3. Amperemeter


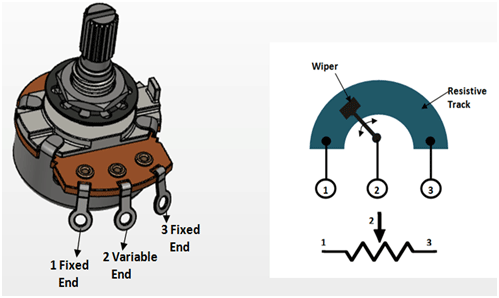
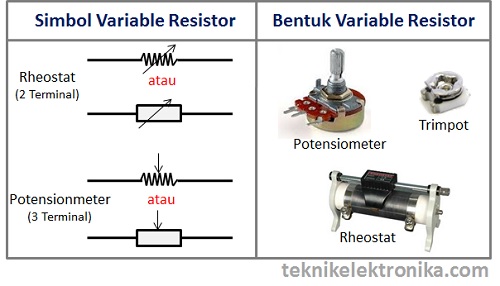
Potensiometer merupakan jenis Variable Resistor yang nilai resistansinya dapat berubah-ubah dengan cara memutar porosnya melalui sebuah tuas.
Fitur Potensiometer:
1. Rating daya 0.3W
2. Tegangan input maksimal 200V DC
3. Kemampuan putaran 2 juta kali
Datasheet Resistor

ctt: SFR16S(biru muda); SFR25(hijau muda); SFR25H(merah kecoklatan).


Datasheet Potensiometer

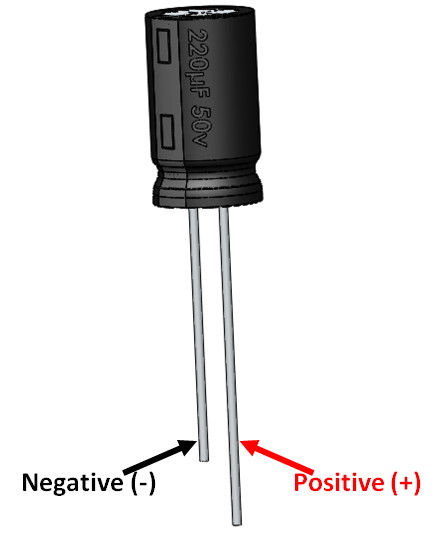
2. Kapasitor


Konfigurasi pin:
Datasheet Kapasitor

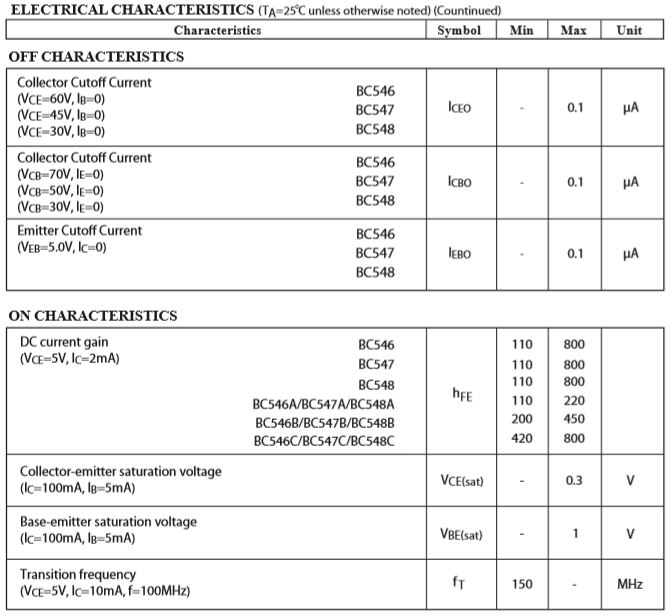
3. Transistor NPN (BC548/BC547)


Fitur:
1. DC Current gain(hfe) maksimal 800
2. Arus Collector kontinu(Ic) 100mA
3. Tegangan Base-Emitter(Vbe) 6V
4. Arus Base(Ib) maksimal 5mA
Datasheet Transistor BC548 dan BC547



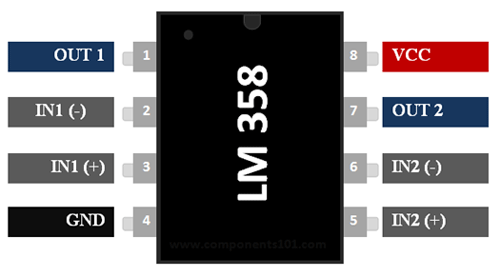
4. Op-Amp LM358


Fitur:
1. Frekuensi dikompensasi internal untuk unity gain.
2. Penguatan DC yang tinggi: 100dB.
3. Supply 1.5V ~ 16V.
4. Supply arus 700uA.
5. Cocok untuk dioperasikan dengan baterai.
6. Tegangan dan arus Offset input rendah.
7. Kisaran tegangan input diferensial sama dengan tegangan catu daya.
Konfigurasi Pin LM358
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 & 7 | OUT1 & OUT2 | Output Op Amp 1 dan 2 |
| 2 & 6 | IN1(+) & IN2(+) | Input Non-Inverting 1 dan 2 |
| 3 & 5 | IN1(-) & IN2(-) | Input Inverting 1 dan 2 |
| 4 | GND | Ground |
| 8 | VCC | Input tegangan VCC |
Datasheet Op-Amp LM358


5. Switch dan Button


6. Relay


Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Maksimum beban AC 10A @ 250/125V
4. Maksimum baban DC 10A @ 30/28V
5. Switching maksimum 300 operasi/menit
Datasheet Relay


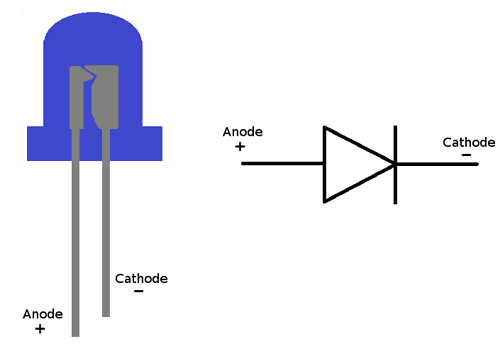
7. LED

Datasheet LED


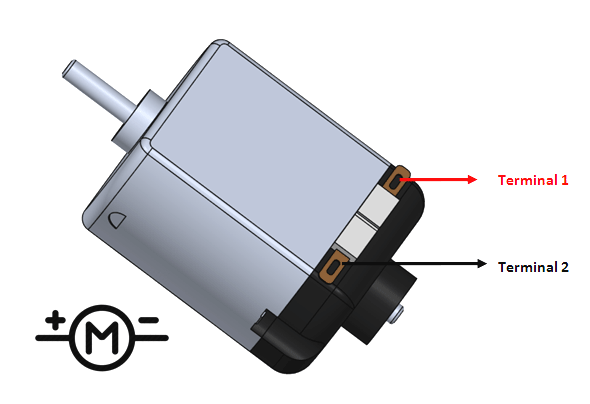
8. Motor DC

Fitur:

9. Sensor GP2D12

Sensor GP2D12 adalah sensor jarak analog yang menggunakan infrared untuk mendeteksi jarak antara 10 cm sampai 80 cm. GP2D12 mengeluarkan output voltase non linear dalam hubungannya dalam jarak objek dari sensor dan menggunakan interface analog to digital converter (ADC)
Konfigurasi pin sensor

Data Sheet sensor

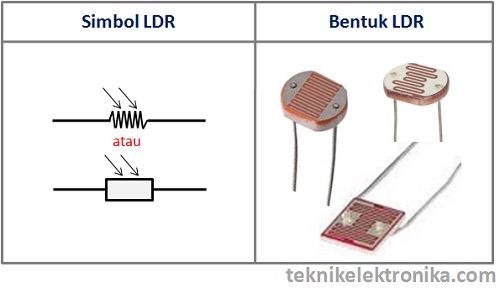
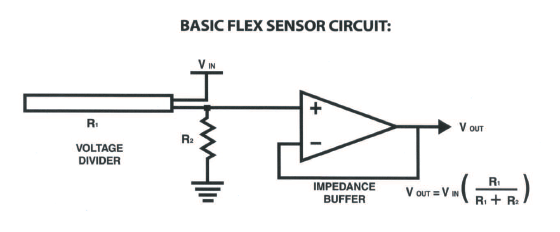
10. Flex Sensor

Flex Sensor adalah sensor yang memiliki perubahan resistansi akibat adanya perubahan lekukan pada bagian sensor. Sensor ini memiliki output berupa resistansi. Sensor ini membutuhkan tegangan sebesar +5V agar bisa bekerja. Output resistansi ini akan diberikan tegangan yang nantinya akan dibaca oleh mikrokontroler.

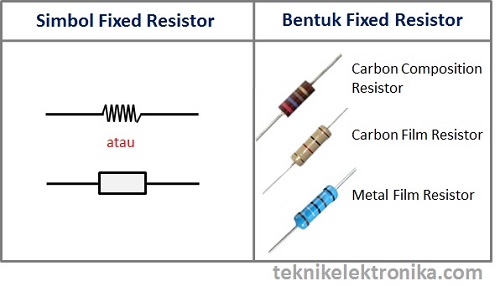
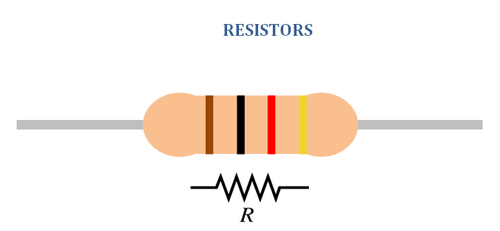
Cara membaca nilai resistor
Cara menghitung nilai resistansi resistor dengan gelang warna :
1. Masukan angka langsung dari kode warna gelang pertama.
2. Masukan angka langsung dari kode warna gelang kedua.
3. Masukan angka langsung dari kode warna gelang ketiga.
4. Masukkan jumlah nol dari kode warna gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10^n).
5. Gelang terakhir merupakan nilai toleransi dari resistor.

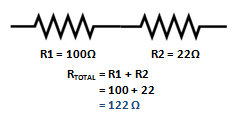
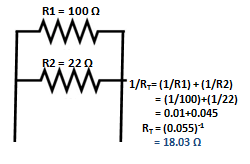
Resistor Seri Resistor Paralel
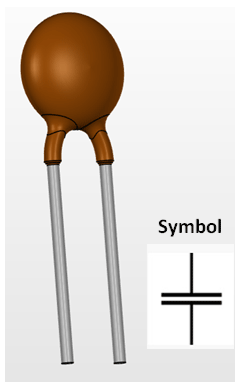
2. Kapasitor
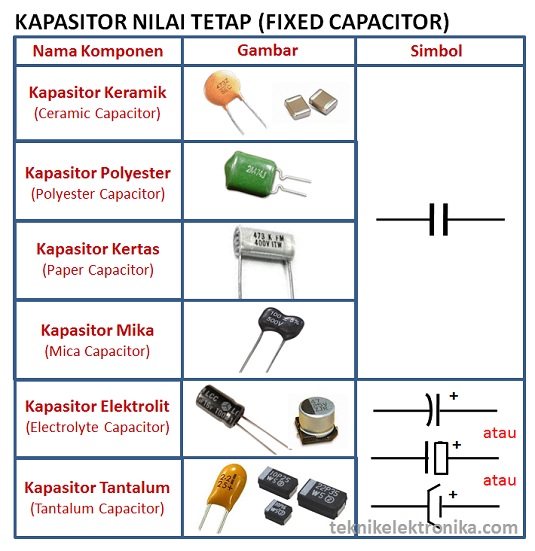
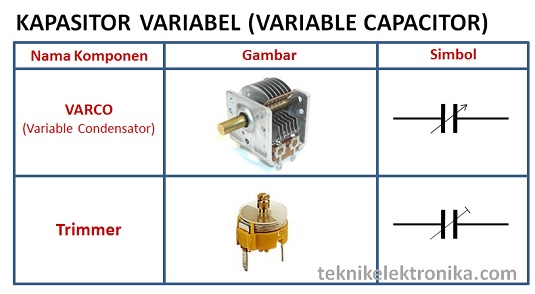
Secara umum kapasitor memiliki fungsi sebagai berikut:
1. Penyimpan muatan listrik sementara.
2. Filter dalam rangkaian power supply.
3. Kopling.
4. Penggeser fasa, dll.
Cara membaca nilai kapasitor
Cara menghitung nilai kapasitor :
1. Masukan 2 angka pertama langsung untuk nilai kapasitor.
2. Angka ke-3 berfungsi sebagai perpangkatan (10^n) nilai kapasitor.
3. Satuan kapasitor dalam piko farad.
4. Huruf terakhir menyatakan nilai toleransi dari kapasitor.
Daftar nilai toleransi kapasitor :
B = 0.10pF
C = 0.25pF
D = 0.5pF
E = 0.5%
F = 1%
G = 2%
H = 3%
J = 5%
K = 10%
M = 20%
Z = + 80% dan -20%
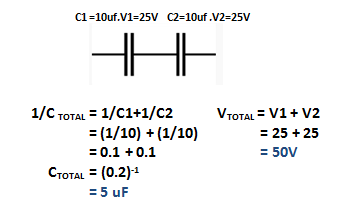
Rumus Kapasitansi Kapasitor
C = Q×V
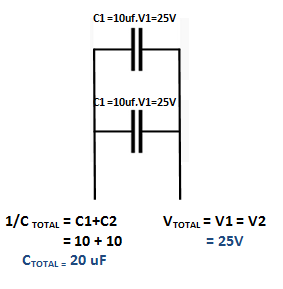
Kapasitor Seri Kapasitor Paralel

1. Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
2. Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
3. Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
4. Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
5. Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
6. Karakteristik tidak berubah dengan suhu
Rangkaian dasar Op Amp


*From Engineering Circuit Analysis by William H. Hayt
Komparator Op Amp
Komparator digunakan untuk membandingkan dua tegangan (V non-inverting dan V inverting) dan mengubah outputnya berdasarkan tegangan sumber.

*From Engineering Circuit Analysis by William H. Hayt
Hubungan input-output:
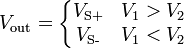
*V1 adalah tegangan input non-inverting; V2 adalah tegangan input non-inverting; Vs adalah tegangan sumber (+Vs/-Vs)
Dari gambar dapat dilihat bahwa op amp digunakan untuk membandingkan Vin terhadap tegangan referensi 2.5V, serta pada op amp dihubungkan sumber tegangan +12V dan -12V. Grafik menunjukkan bahwa jika tegangan Vin lebih besar dari 2.5V maka Vout adalah -12V, sebaliknya jika tegangan Vin lebih kecil dari 2.5V maka Vout adalah +12V.
4. LED
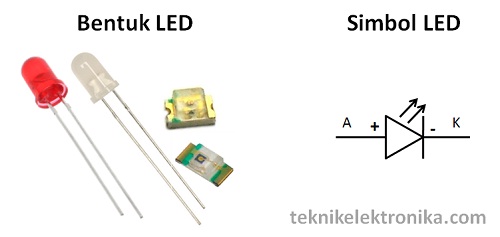
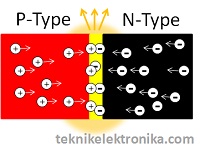
Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).
Tegangan Maju LED

Pada transistor PNP, semikonduktor tipe-N diapit oleh dua semikonduktor tipe-P. Transistor PNP juga dapat dibentuk dengan menghubungkan katoda dari dua dioda sebagai base dan anoda sebagai kolektor dan emitor. Hubungan emitter-base foward bias sementara collector-base reverse bias. Jadi, arus mengalir dari emitor ke kolektor karena potensial emitor lebih besar daripada base dan kolektor.
Transistor NPN
Pada transistor NPN, semikonduktor tipe-P diapit oleh dua semikonduktor tipe-N. Transistor NPN juga dapat dibentuk dengan menghubungkan anoda dari dua dioda sebagai base dan katoda sebagai kolektor dan emitor. Arus mengalir dari kolektor ke emitor karena potensial kolektor lebih besar daripada base dan emitor.
Transistor sebagai saklar
Jika ada arus yang cukup besar di kaki basis, transistor akan mencapai titk jenuh (saturasi). Pada titk jenuh ini transistor mengalirkan arus secara maksimum dari kolektor ke emitor sehingga transistor seolah-olah short pada hubungan kolektor-emitor. Jika arus base sangat kecil maka kolektor dan emitor bagaikan saklar yang terbuka. Pada kondisi ini transistor dalam keadaan cut-off sehingga tidak ada arus dari kolektor ke emitor. Nilai resistor terhubung ke base (Rb) dapat dihitung dengan;
Rb = Vbe / Ib
Transistor sebagai penguat
Transistor sebagai penguat jika bekerja dalam daerah aktif. Tegangan, arus, dan daya dapat diperkuat dengan beberapa konfigurasi seperti common emitter, common colector, dan common base.
DC Current Gain = Collector Current (Ic) / Base Current (Ib)
6. Relay
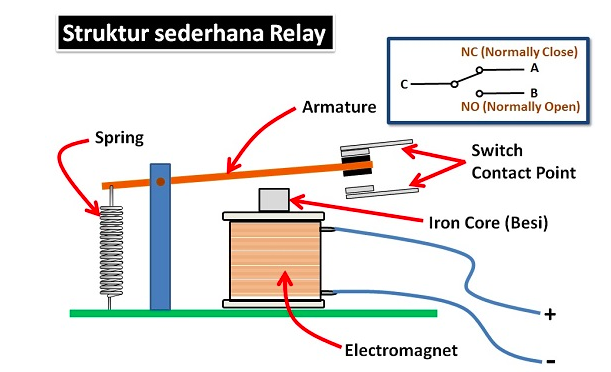
Terdapat besi atau yang disebut dengan nama iron core dililit oleh sebuah kumparan yang berfungsi sebagai pengendali. Sehingga ketika kumparan coil diberikan arus listrik maka akan menghasilkan gaya elektromagnet. Gaya tersebut selanjutnya akan menarik armature untuk pindah posisi dari normally close ke normally open. Dengan demikian saklar menjadi pada posisi baru normally open yang dapat menghantarkan arus listrik. Ketika armature sudah tidak dialiri arus listrik lagi maka ia akan kembali pada posisi awal, yaitu normally close.
Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Maksimum beban AC 10A @ 250/125V
4. Maksimum baban DC 10A @ 30/28V
5. Switching maksimum 300 operasi/menit
7. Motor DC
Cara kerja motor DC
8. Sensor GP2D12

Spesifikasi Teknis:
.a. Range 10 – 80 cm
b. Update frequency/ period 25 Hz / 40ms
c. power supply voltage 4.5 – 5.5 V
d. Noise on analog output < 200mV
e. Mean consumtion 35 mA
Kelemahan:
a. Respon 40ms
b. Error bila jarak <10cm dan pada cermin
c. Hanya dapat mengukur <80 cm
Kelebiahan:
a. Dapat mengukur jarak pada bidang miring
b. Sudut pengukuran sempit
c. Sangat direktif
Berikut hubungan anatara jarak dan deteksi objek terhadap output analog sensor

9. Flex Sensor
Sensor flex adalah sensor yang memiliki perubahan resistansi akibat adanya perubahanlekukanpadabagiansensor, untuk mendeteksi suatu kelengkungan. Prinsip kerjanya sama seperti potensimeter. Sensor flex memiliki 2 kaki pin, dengan bentuk fisik tipis memanjang dan lentur. Sensor ini memiliki output berupa resistansi. Dua pin kaki tersebut, jika salah satu pin diberikan tegangan sebesar +5 V maka pin yang lainnya sebagai output serta tegangan 0 Volt. Prinsip kerja sensor flex ini mirip dengan variabel resistor. Sensor flex memberikan resistansi kepada mikrokontroler melalui rangkaian pembagi tegangan. Output resistansi ini akan diberikan tegangan yang nantinya akan dibaca oleh mikrokontroler.
Mikrokontroler mengkonversi data menggunakan ADC (analog to digital converter), dimana data masukkannya didapat dari tegangan yang sudah terkena resistansi.
Hambatan sensor fleksibel ini berubah ketika bantalan logam berada diluar tekukan.Spesifikasi:
- Cakupan suhu : -35℃ sampai +80℃
- Hambatan datar : 10K Ohm
- Toleransi hambatan : ±30%
- Cakupan hambatan tekukan : 60K Ohm
- Nilai power : 0,5 Watt dst. 1 Watt sampai batas maksimal
- Resistansi flat 10Kohm ± 30%
- Rentang lengkungan kontur antara 45 KOhm – 125 Kohm
1. Hubungkan rangkaian seperti pada gambar.
2. Hubungkan sumber ke vcc pada rangkaian.
3. Hubungkan voltmeter dan ampremeter untuk pengukuran pada rangkaian.
4. Mulai simulasi rangkaian dan aktifkan sensor secara bergantian.

PRINSIP KERJA RANGKAIAN
- Kontrol Kursi Maju (jari tengah)
- Kontrol Kursi Mundur (jari manis)
- Kontrol Kursi Ke Kiri (jari telunjuk)
- Kontrol Kursi Ke Kanan (jari kelingking)
- Kontrol Kursi Untuk Berhenti
- Rangkaian sensor jarak
Download file simulasi proteus
Download video simulasi proteus
Download Datasheet Resistor
Download Datasheet Potensiometer
Download Datasheet Kapasitor
Download Datasheet Transistor BC547/BC548
Download Datasheet Op-Amp LM358
Download Datasheet Motor DC
Download Datasheet Relay 5V
Download Datasheet Dioda
Download Datasheet LED
Download Datasheet Sensor GP2D12
Download Datasheet Flex Sensor
Download Library Flex Sensor
Tidak ada komentar:
Posting Komentar